Multi Disciplinary Project

Overview
The final project of the first year of the MSc Robotics at TU Delft is the Multi Disciplinary Project (MDP). During this 10-week project, students work in teams to solve a real-world robotics challenge. This year, in collaboration with Lely, the goal was to develop a robot capable of cleaning barns autonomously.
To demonstrate the solution, each team received a newly developed robot platform called the Mirte Master, an open-source educational robot. Since this was the first year the platform was used, only limited functionality was available. The robot was equipped with a LiDAR sensor, stereo camera, IMU, and robotic arm. Each team consisted of five students.
My Contribution
Due to the limited functionality of the robot platform, developing and testing directly on the hardware was difficult. To overcome this, I created a simulation environment using ROS and Gazebo. The robot model was generated by exporting the URDF from SolidWorks using the SolidWorks URDF Exporter.
After setting up the simulation, I focused on implementing the full-coverage path planner. Because the wireless connection between the robot and the main computer was unreliable, we designed a system where the planner generated a virtual target that moved along the computed path based on the SLAM map. The robot then followed this target using a PID controller running at 10 Hz.
Most of the high-level software was written in Python, while the low-level robot functionality was implemented in C++.
Cleaning the Barn
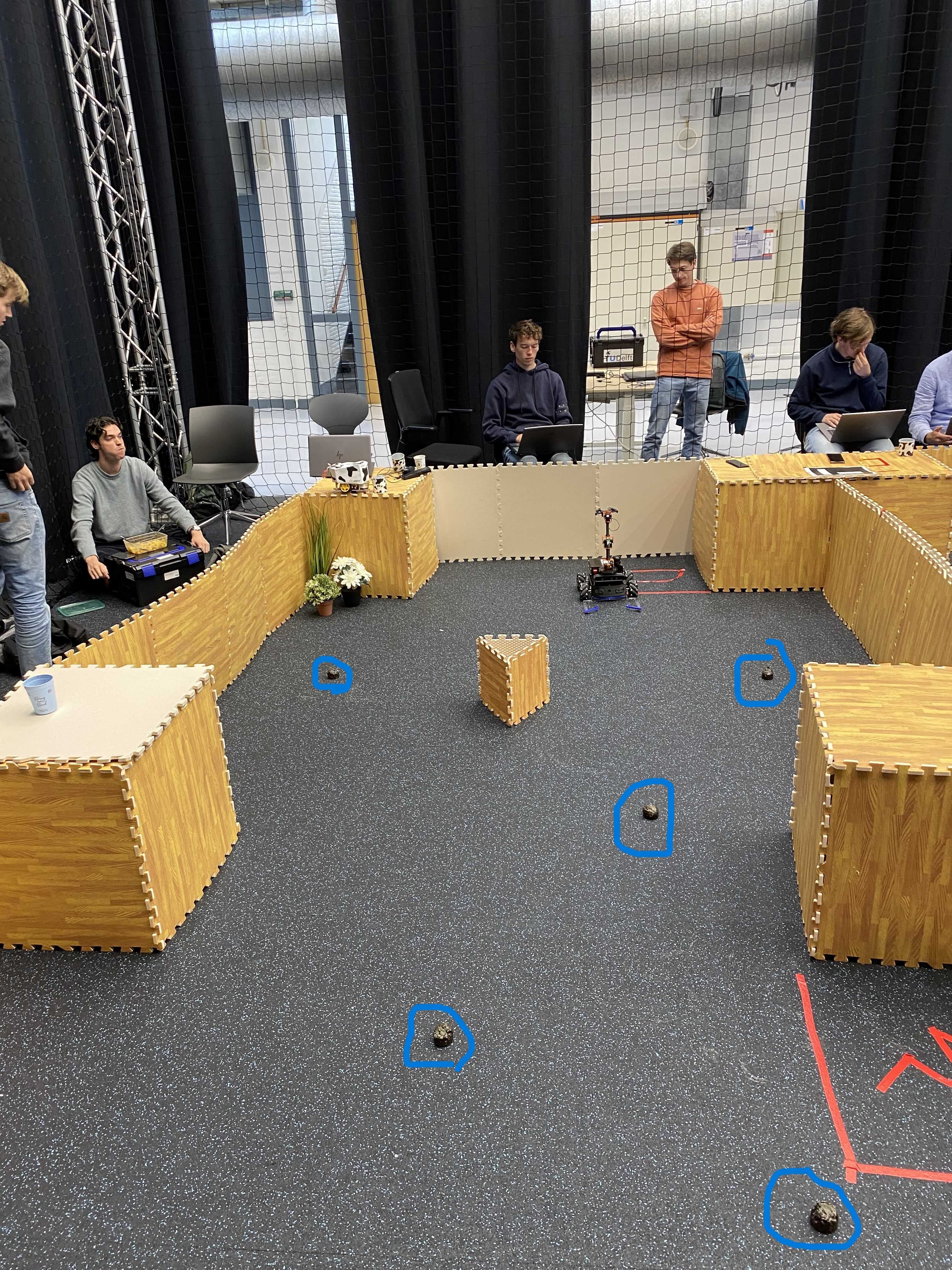
During testing, the robot was tasked with cleaning a mock barn environment. Since real manure could not be used, small foam objects were placed throughout the test area to simulate manure, as shown in the image.
To collect the foam pieces effectively, we designed and mounted a gripper at the front of the robot. By following the full-coverage path, the robot was able to clean most of the test area successfully. The main challenge remained the edges and corners of the environment, where some pieces could become trapped.
Conclusion
During the final demonstration day, we successfully presented our solution and received the first-place award for best overall solution and demonstration.